Перенос ROS c Ubuntu на решения «Базальт СПО» (Роман Ставцев, OSSDEVCONF-2022)
Материал из 0x1.tv
Короткая ссылка: 20220522D
- Докладчик
- Роман Ставцев


Robotic Operating System (ROS) это активно развивающийся платформа (фреймворк) для разработки программного обеспечения роботов. Состоит из набора разнообразных инструментов, библиотек и определённых правил, которые упрощают решение задач разработки ПО управления роботами. ROS представляет собой надстройку над ОС.
Исторически сложилось, что основной ОС для ROS является Ubuntu.
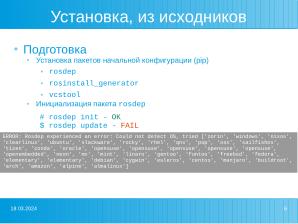
Дополнительно доступны и другие OC, Debian, Arch Linux, появляется поддержка Windows и macOS. Основным методом распространения являются бинарные пакеты, также возможна установка из исходных кодов. Рассмотрим возможность сборки ROS1 из исходных кодов в среде ОС Альт.
Содержание
Видео
Презентация


Thesis
!.jpg)