Симуляция пилотирования летательного аппарата с помощью информационной системы управления учебным макетом (Екатерина Бесчвертная, OSEDUCONF-2024) — различия между версиями
Материал из 0x1.tv
StasFomin (обсуждение | вклад) (→Thesis) |
StasFomin (обсуждение | вклад) |
||
| (не показана одна промежуточная версия этого же участника) | |||
;{{SpeakerInfo}}: {{Speaker|Екатерина Бесчвертная}}
<blockquote>
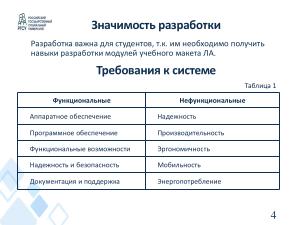
Представлена разработанная авторами информационно-измерительная система, предназначенная для пилотирования учебным макетом летательного аппарата. Использование системы обусловлено необходимостью получения студентами навыков разработки модулей учебного макета летательного аппарата.
В разработке использован модуль инерциальной навигации IMU-9 DOF, иные датчики информации, а также программные средства визуализации данных. Приведены результаты экспериментов.
</blockquote>
{{VideoSection}}
{{vimeoembed|990136024|800|450}}
{{youtubelink|}}
|rbP8zvl_QkI}}
{{SlidesSection}}
[[File:Симуляция пилотирования летательного аппарата с помощью информационной системы управления учебным макетом (Екатерина Бесчвертная, OSEDUCONF-2024).pdf|left|page=-|300px]]
{{----}}
== Thesis ==Ссылки:
* <i>Скворцова М. А.</i> БПЛА вертикального взлёта и посадки для мониторинга местности, [https://www.elibrary.ru/item.asp?edn=gvzzso]
* <i>Симонов В. Л., Ерпелев А. В., Давыдова Е. К., Хохлов Е. Г.</i> Моделирование системы управления вертикальным взлётом и посадкой, [https://www.elibrary.ru/item.asp?edn=edvgto]
* <i>Вепрева Е. Л., Махонина А. Н.</i> Разработка систем управления моделями наземных и воздушных беспилотных транспортных средств, [https://www.elibrary.ru/item.asp?edn=kjnppe]
* Программа Arduino IDE, [https://all-arduino.ru/arduino-ide/].
{{----}}
[[File:{{#setmainimage:Симуляция пилотирования летательного аппарата с помощью информационной системы управления учебным макетом (Екатерина Бесчвертная, OSEDUCONF-2024)!.jpg}}|center|640px]]
{{LinksSection}}
<!-- <blockquote>[©]</blockquote> -->
<references/>
[[Категория:OSEDUCONF-2024]]
[[Категория:Draft]]
[[Категория:СПО в образовании]] | |||
Текущая версия на 08:31, 3 августа 2024
- Докладчик
- Екатерина Бесчвертная
Представлена разработанная авторами информационно-измерительная система, предназначенная для пилотирования учебным макетом летательного аппарата. Использование системы обусловлено необходимостью получения студентами навыков разработки модулей учебного макета летательного аппарата.
В разработке использован модуль инерциальной навигации IMU-9 DOF, иные датчики информации, а также программные средства визуализации данных. Приведены результаты экспериментов.
Содержание
Видео
Презентация









Thesis


Тенденция перехода с пилотируемых летательных аппаратов на беспилотные ставит перед разработчиками данных систем новые задачи. Важно готовить специалистов для пилотирования БПЛА. Для выполнения этого требования нужна разработка система управления, которая поможет в рамках учебной деятельности тренировать пользователей, совершенствовать их знания и навыки пилотирования.
В статье рассматривается информационная система управления учебным макетом летательного аппарата на базе
платформы Arduino. Для программной разработки применена такие среды, как Arduino IDE и Processing 3.
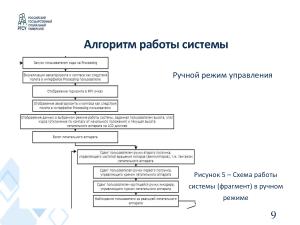
В ходе работы были проведены эксперименты: запущена система, в которой предусмотрены два режима функционирования: ручное и автоматическое управление. Эти варианты работы системы выбираются и применяются пользователем на наземной части — цепи, представляющей собой управляющие компоненты, подключённые к микроконтроллеру Arduino Mega 2560. Управляющими компонентами названы два ползунковых потенциометра Trema-SLIDERS и энкодер. Сам макет летательного аппарата закреплён на весах Роберваля и является подвижной частью системы. На другом плече находится противовес. В подвижной части системы есть модуль IMU-9 DOF. Он считывает углы Эйлера. Эти углы влияют на крен, тангаж и курс летательной машины в полёте. Значения углов задаются управляющими элементами наземной части системы. Полёт летательного аппарата возможен благодаря пяти двигателям с пропеллерами. К наземной и подвижной частям системы подключено по одному радиомодулю для беспроводной передачи данных. Ручной режим управления заключается в мониторинге пользователем полёта и адаптации частоты вращения пропеллеров в соответствии с требованиями. Так, за счёт сдвига ручки ползунков и поворота ручки энкодера пользователь добивается взлёта, посадки, поворота и крена летательного аппарата. Чем больше мощность подаётся на двигатели, тем выше поднимается летательная машина.
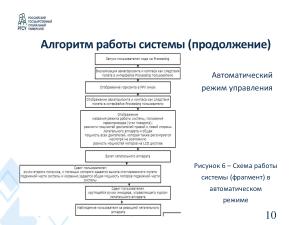
Автоматический режим управления заключается в том, что пользователь добивается набора высоты летательного аппарата
с помощью одного ползунка: при сдвиге его ручки задаётся желаемая высота полёта, и далее происходит стабилизация
частоты вращения моторов и, как следствие, текущей высоты. Данные о высоте передаются с закреплённого на
летательном аппарате дальномера HC-SR04.

Главную роль в визуализации играют программный код на Processing, при запуске которого на мониторе отображаются бортовые приборы, — авиагоризонт и компас, FPV-очки с подключёнными по радио каналу к ним FPV камерой и символьный ЖК-дисплей. FPV-камера фиксирует то, что видит перед собой. Перед ней может находиться плакат с горизонтом, и тогда пилот в очках будет погружён в симуляцию так, как если бы являлся пилотом самолёта. ЖК-дисплей показывает режим, углы Эйлера, желаемую и текущую высоту.
Были проведены экспериментальные запуски. Результаты представлены на рисунках.
Ссылки:
- Скворцова М. А. БПЛА вертикального взлёта и посадки для мониторинга местности, [1]
- Симонов В. Л., Ерпелев А. В., Давыдова Е. К., Хохлов Е. Г. Моделирование системы управления вертикальным взлётом и посадкой, [2]
- Вепрева Е. Л., Махонина А. Н. Разработка систем управления моделями наземных и воздушных беспилотных транспортных средств, [3]
- Программа Arduino IDE, [4].
!.jpg)